

YOLOL cord for Auto Speed Control : PID Speed Control
Code to PID Control
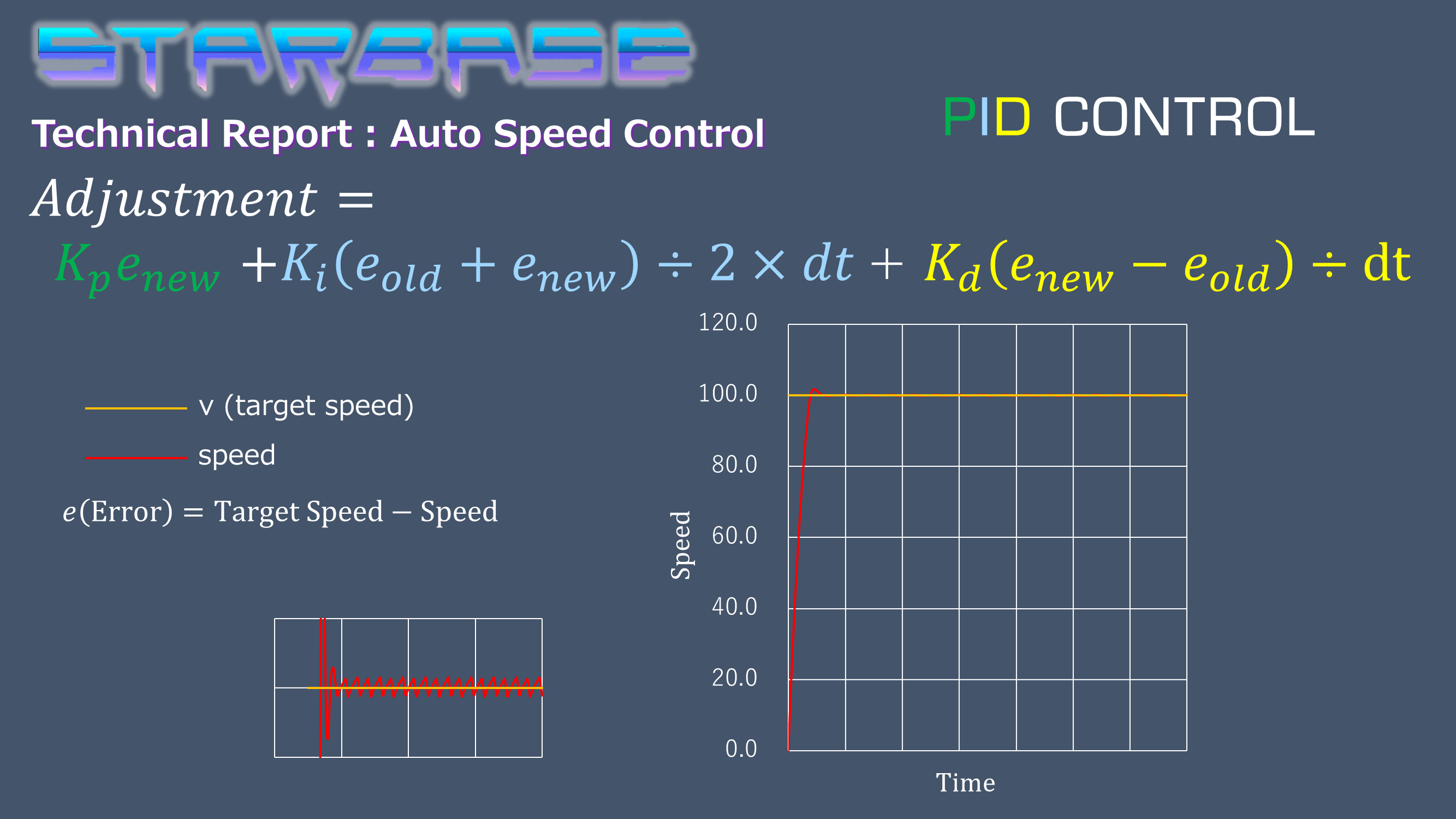
kp=0.05 ki=0.05 kd=0.1 dt=0.4 eo=en if :as==0 then goto 1 end
en=:v-:speed :FcuForward+=kp*en+ki*(en+eo)/2*dt+kd*(en-eo)/dt goto 1Code to Limit Values
if :FcuForward < 0 then :FcuForward = 0 end
if :FcuForward > 100 then :FcuForward = 100 end goto 1[Image] Control Concepts
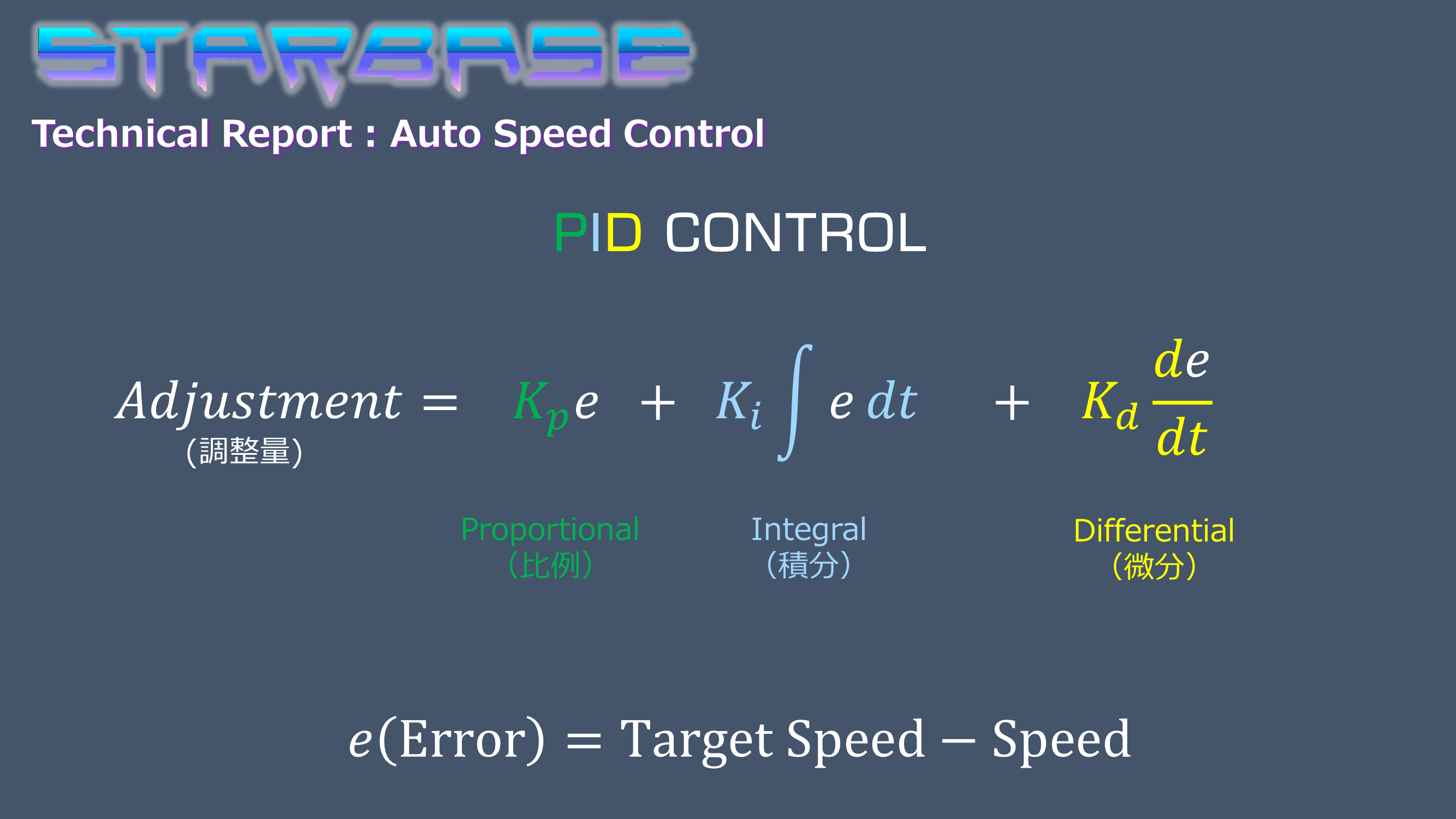
Theory of PID control
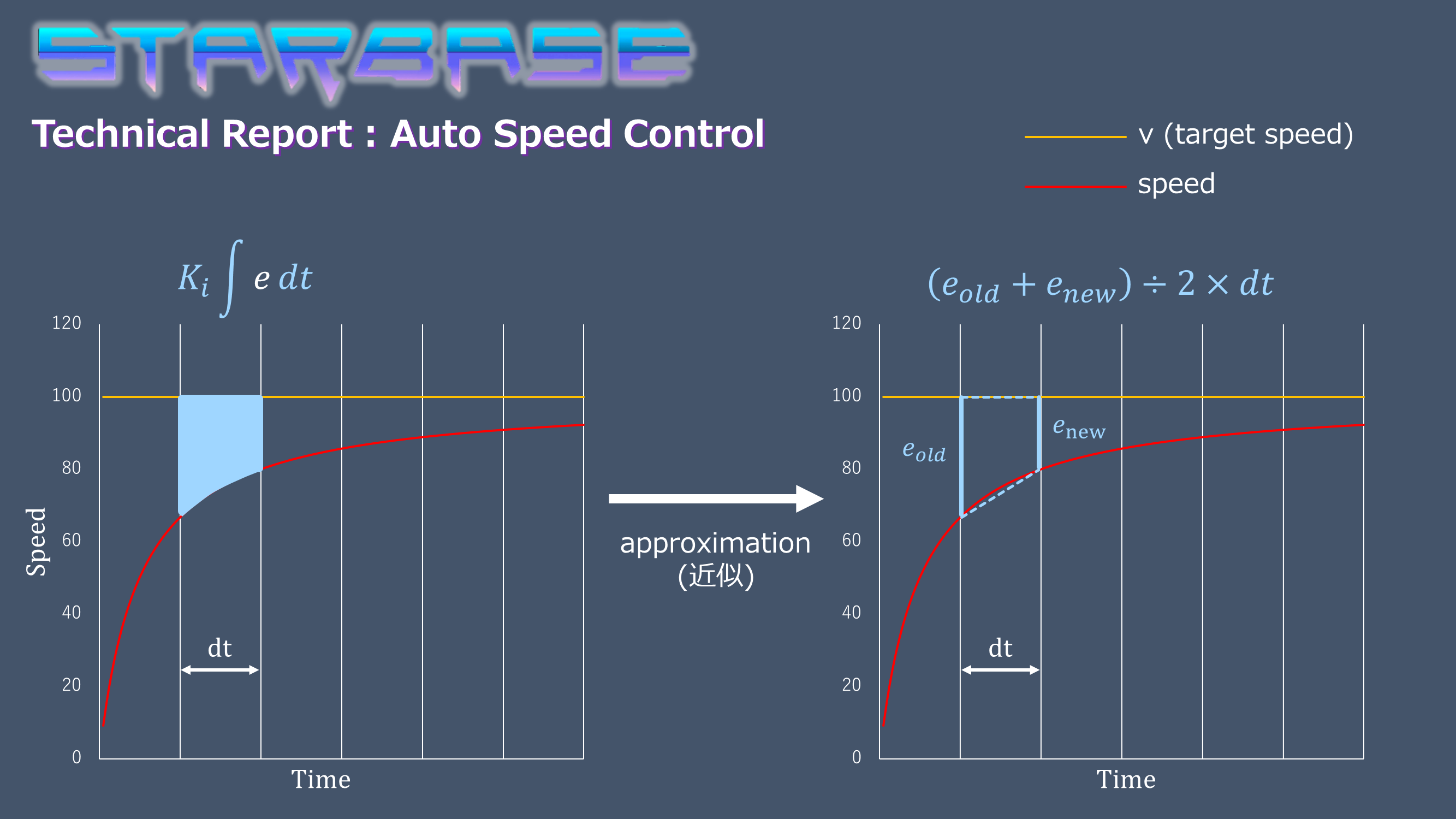
Approximating the Integral
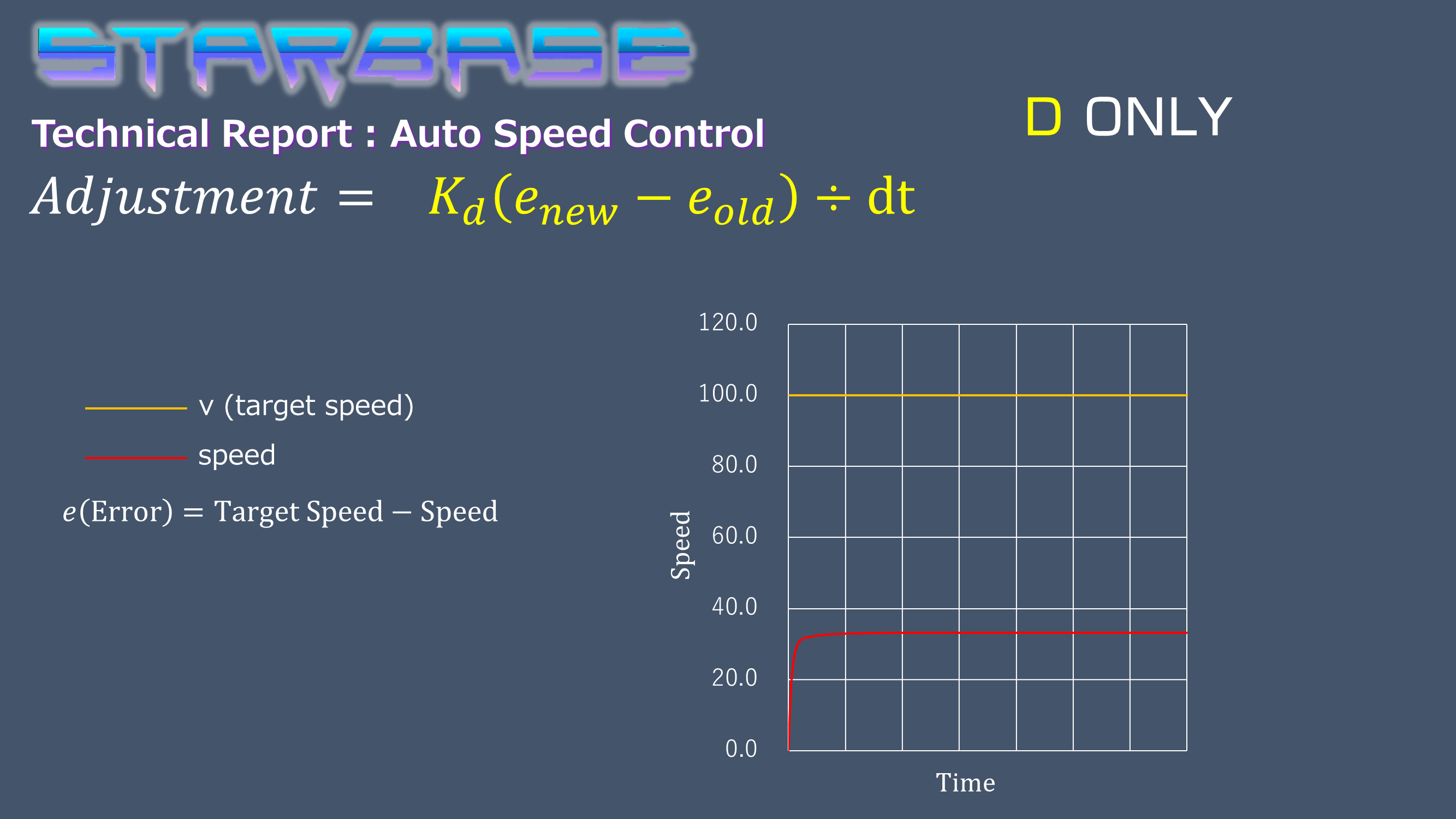
Approximating the derivative

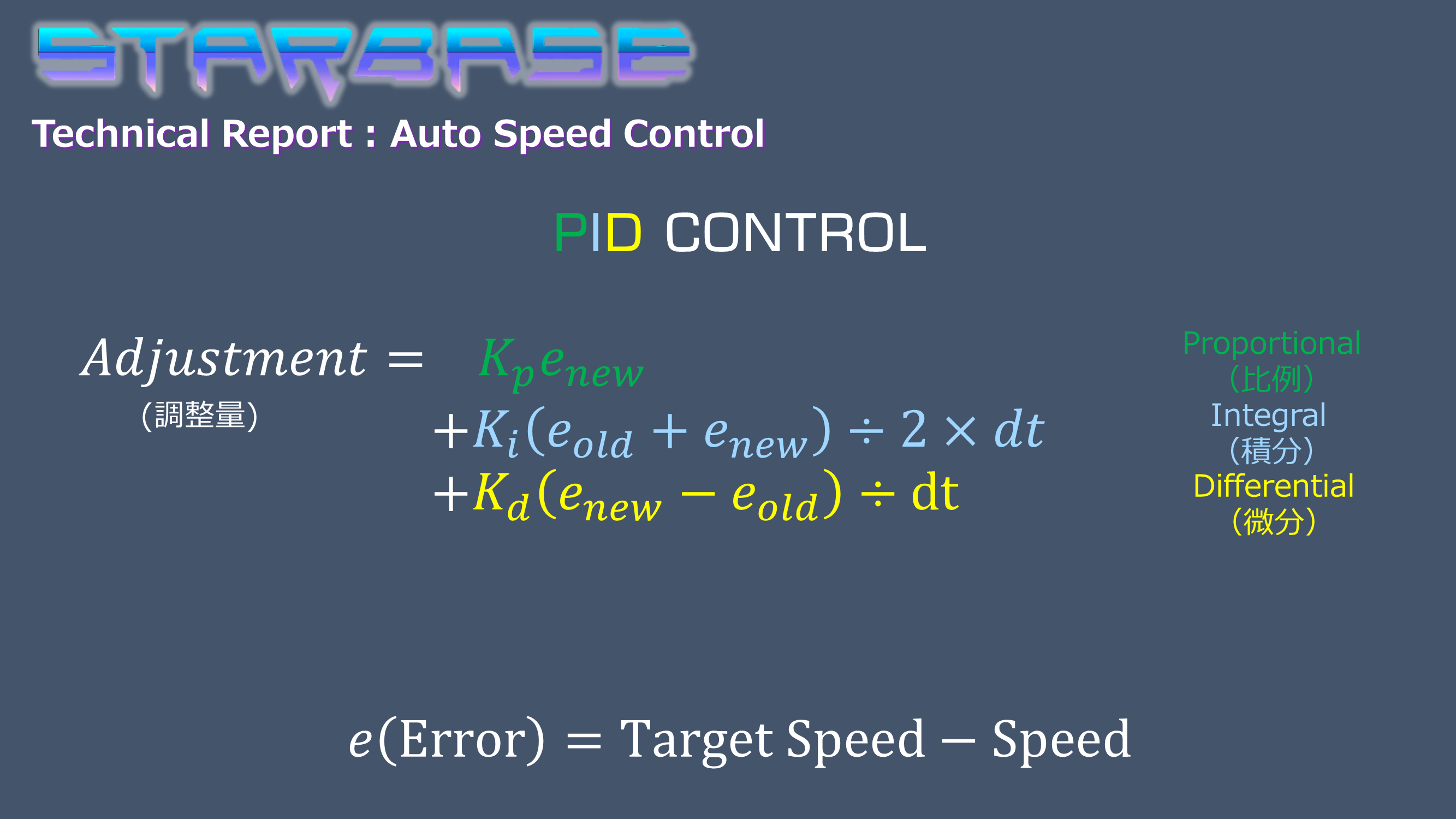
PID control after approximation
[Image] Coefficients : Adjustment of Kp, Ki, Kd
D control cannot operate independently.
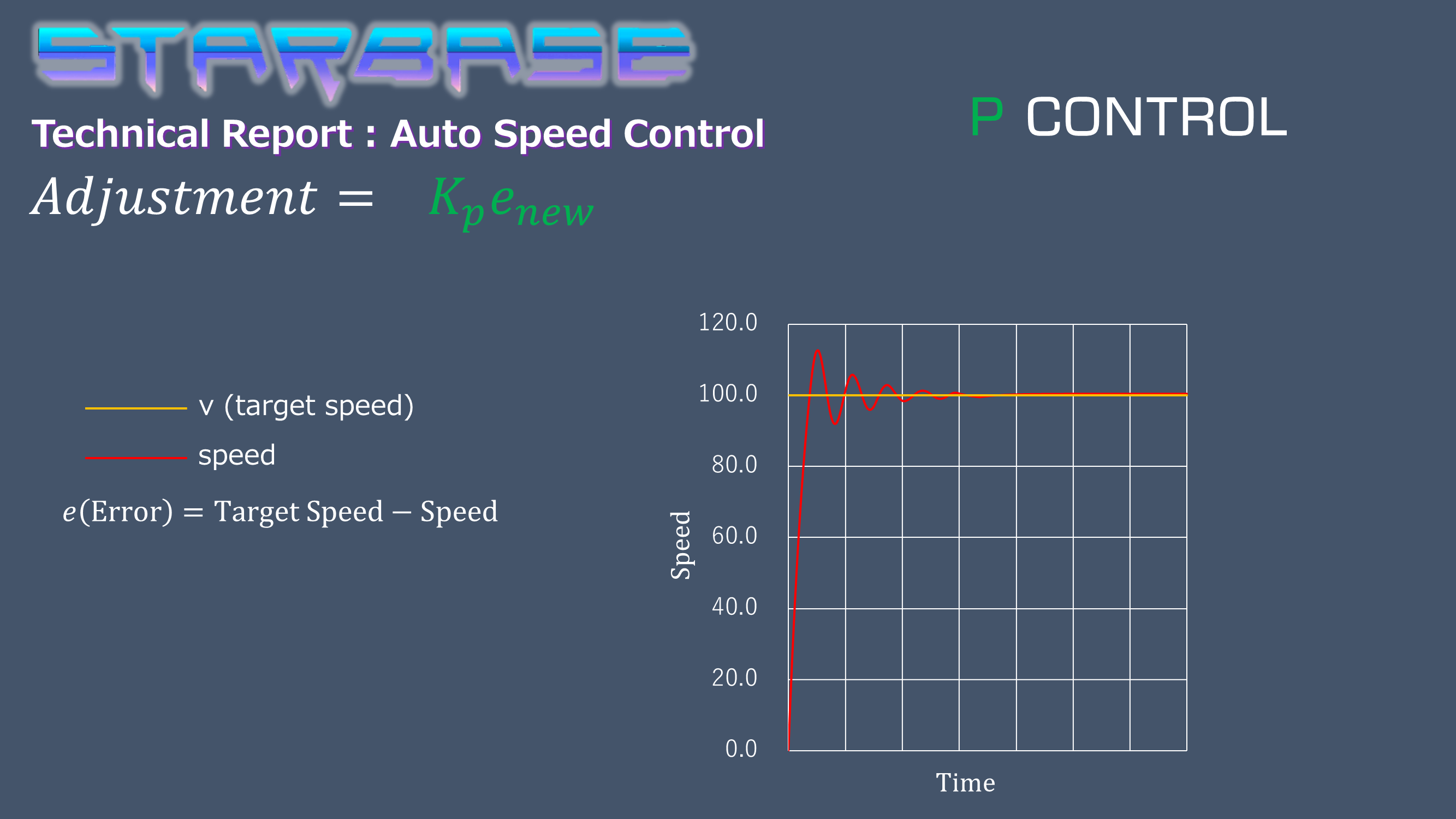
Determined from Kp
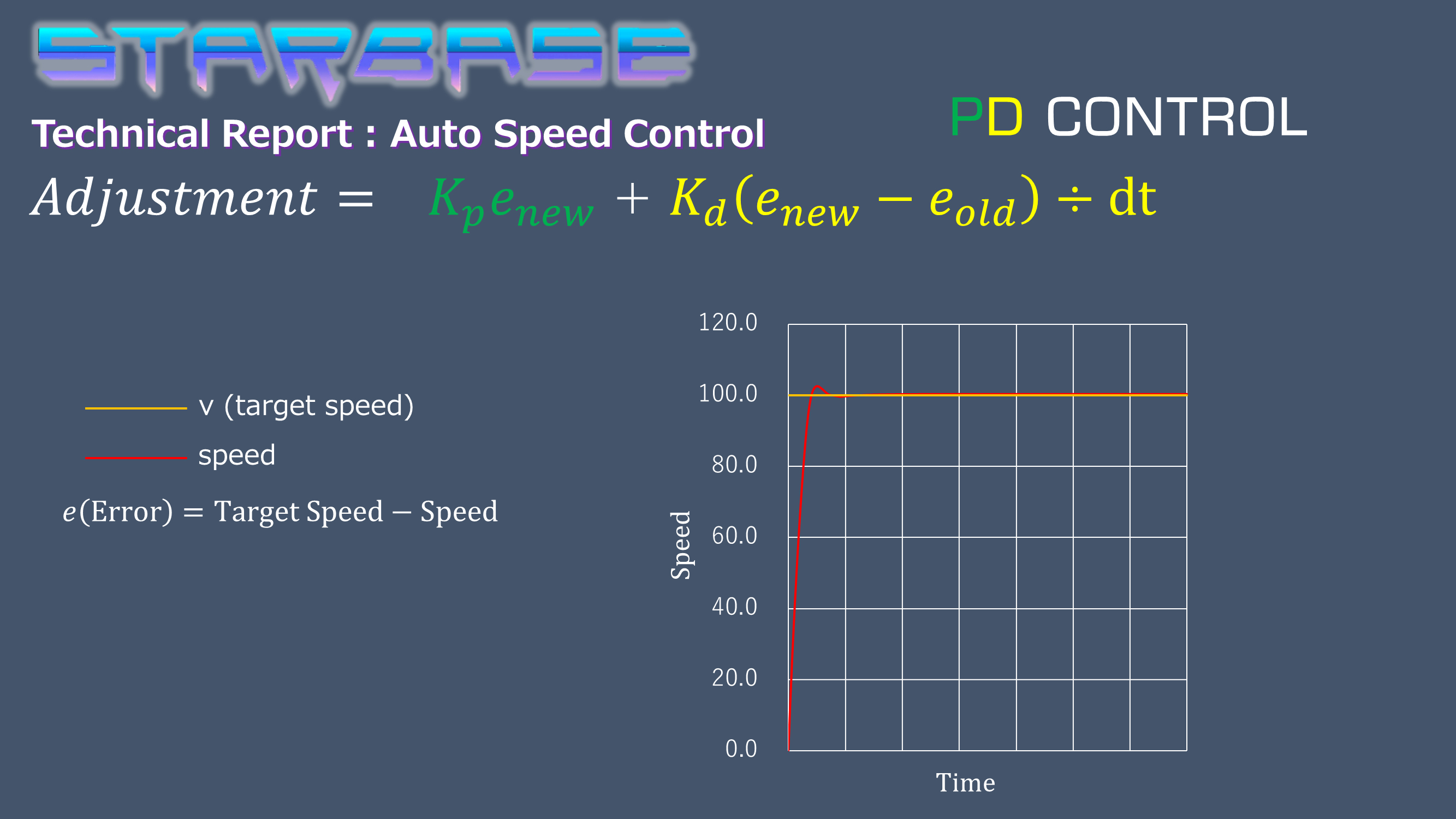
PD control with additional Kd
This is enough for most people.
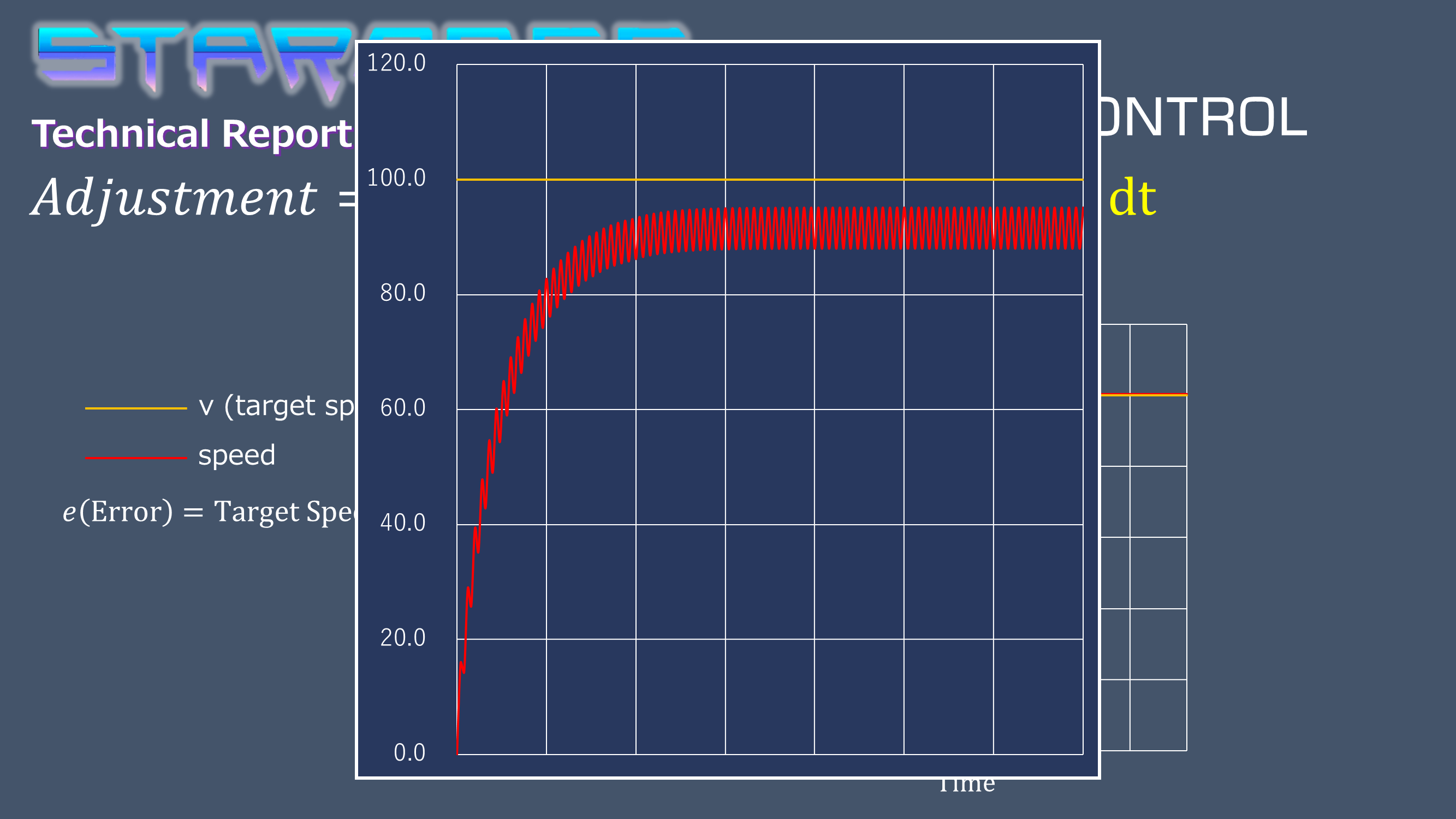
If Kd is made too large, the value will be returned in excess.
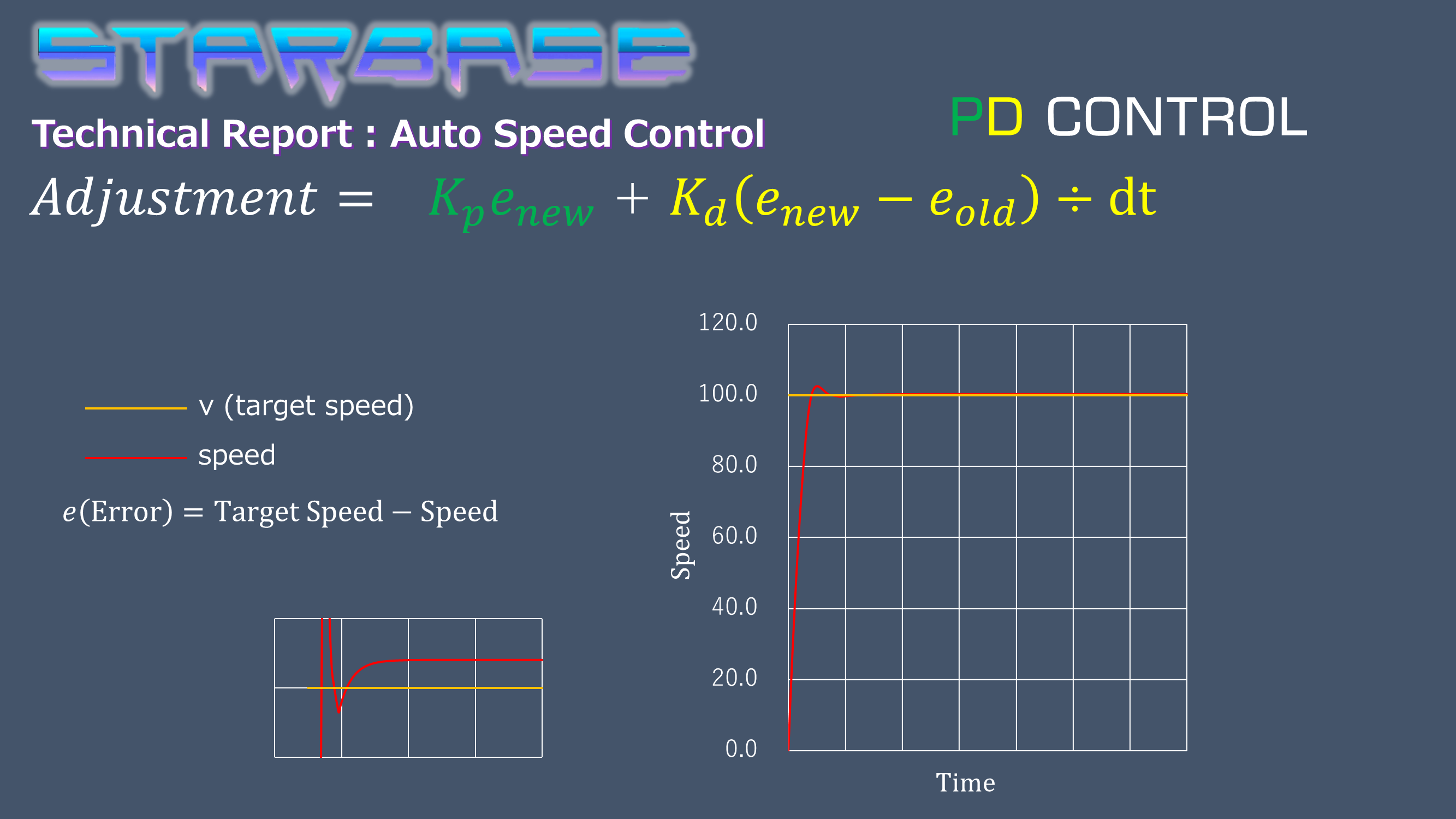
Steady-state error may remains in PD control
PID control for more precise applications
[Video] Audio description and actual behavior
【Starbase】技術報告: 自動スピード制御.



Comment